线性变换(Linear Transformation)的本质
线性变换主要是旋转和缩放,是一种"均匀"的变换。一定能被一个实矩阵表示
通过3b1b的线代基础视频:线性代数的本质 - 03 - 矩阵与线性变换,我们知道线代变换矩阵的一种本质理解:
二维下的线性变换
其中 R= \begin{bmatrix} a & b \\ c & d \end{bmatrix} 是线性变换矩阵。一般来说,想要将目标变换的线性变换矩阵写出来,只需要看这个变换中坐标轴变换后的结果,组合即可得到线性变换矩阵(详细看3b1b的视频)
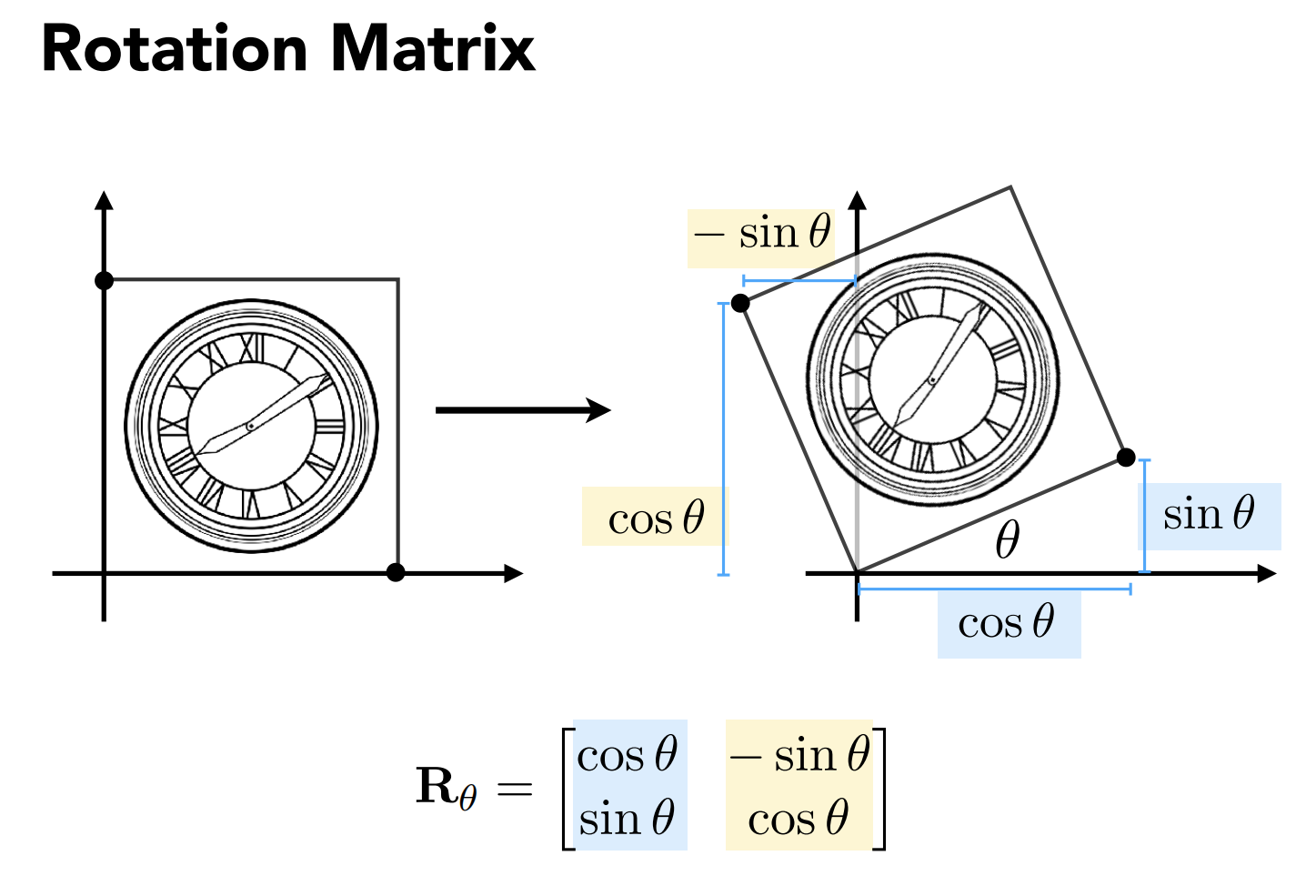
二维旋转矩阵
根据上面的知识,可以写出二维下的旋转矩阵:
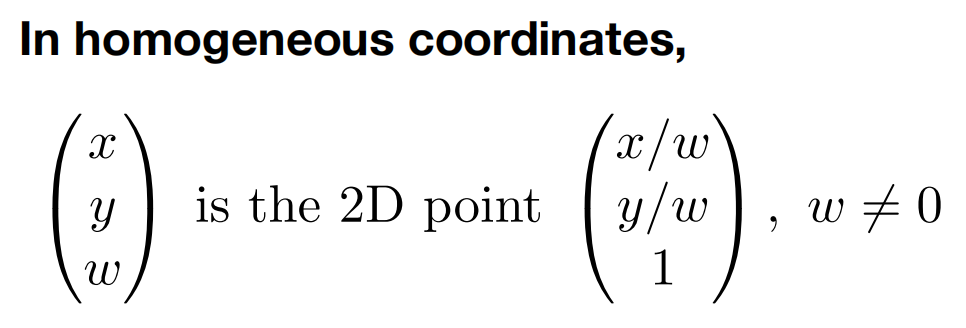
齐次坐标系(Homogeneous coordinates)
如何表示平移变换?
对于二维平面上的变换,二维矩阵和二维坐标仅能表示线性变换,而线性变换不包括平移。
如果要表示平移,必须携程下面这种形式:
可以看到,这种形式无论如何都无法表示成一个矩阵(不是齐次方程)。我们不希望平移变换是变换中的特例,为了用一个矩阵同时表示线性变换和平移变换,引入齐次坐标系的概念:
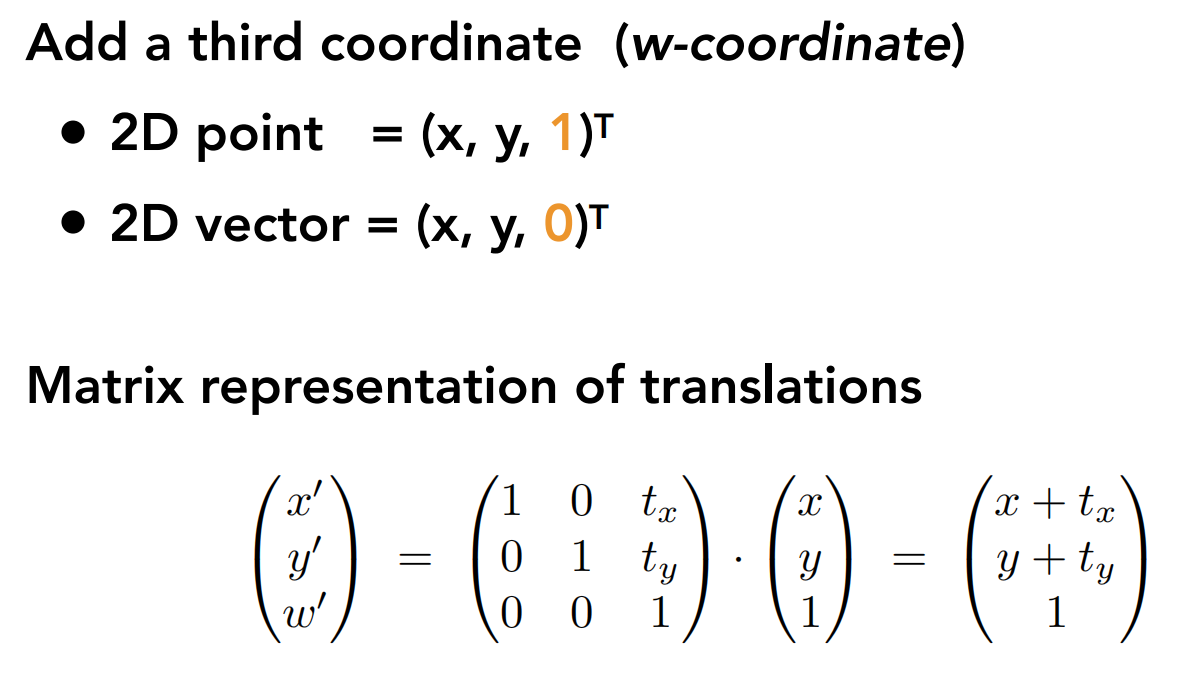
齐次坐标系中多引入了一个维度 \omega ,当它为0时表示向量,为1时表示点。于是二维平移变换就可以用上面的三维矩阵表示。
\omega
的取值为什么是1和0?这是因为这样取值不仅能使平移变换能用上面的矩阵表示,还有以下良好性质:
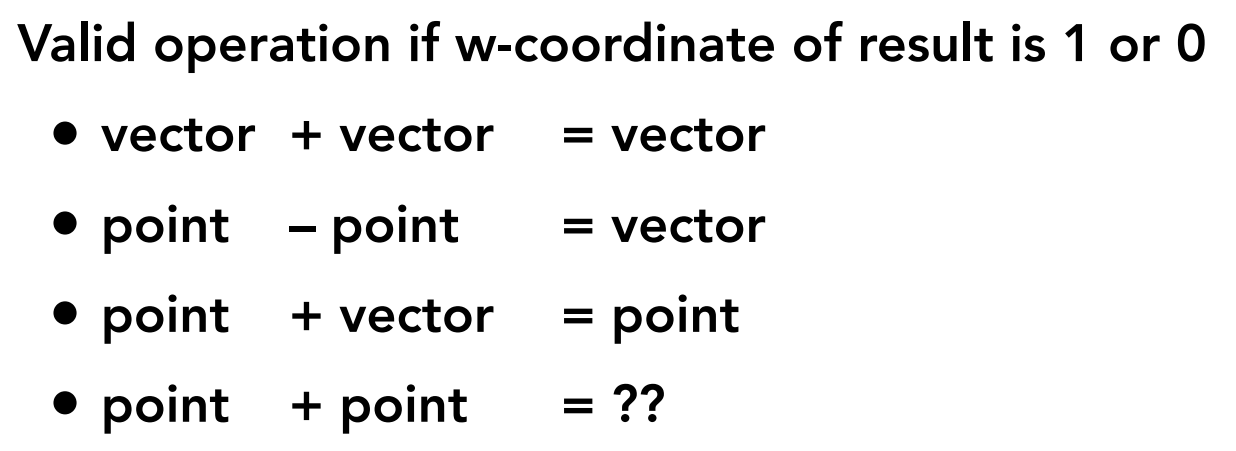
点+点本来就没意义;其他都完美符合点和向量的运算定义,实在是太优雅了!\omega 的取值不是0或1时,它的定义是:
这个定义在后面推导投影变换时会很有用。
将线性变换和平移结合?仿射变换!
如果想用一个矩阵表示 \begin{bmatrix} x_{out} \\ y_{out} \end{bmatrix} = \begin{bmatrix} a & b \\ c & d \end{bmatrix} \begin{bmatrix} x_{in} \\ y_{in} \end{bmatrix} + \begin{bmatrix} t_x \\ t_y \end{bmatrix} ,可以写成以下形式:
简单计算一下就知道结果是正确的,齐次坐标的优雅再次体现:一个矩阵就能表示任何线性变换和平移的组合
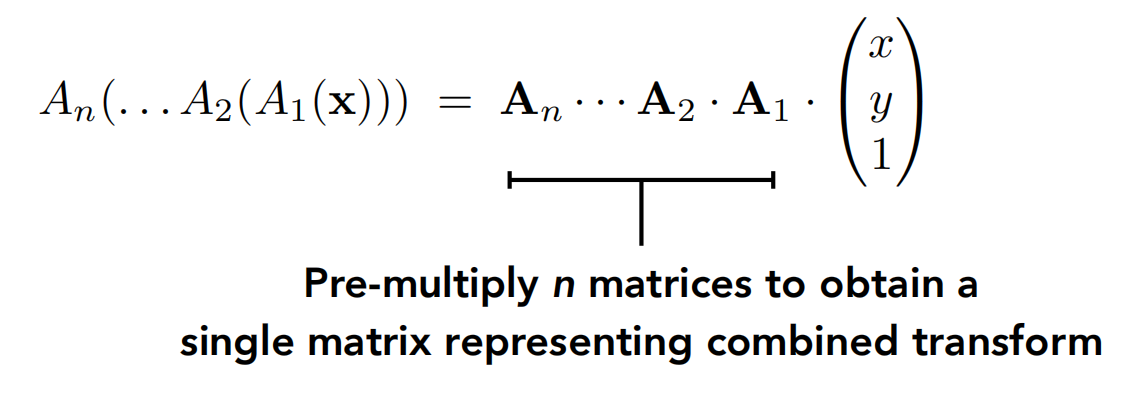
这就是仿射变换!这里需要明确注意,对于一个仿射变换矩阵,虽然它可能由无数多个矩阵组合而来,但最终它本质上表示的是先线性变换再平移变换。
如果想做先平移再线性,那就只能先写成类似于 \begin{pmatrix} x_{out} \\ y_{out} \\ 1 \end{pmatrix} = \begin{pmatrix} a & b & 0 \\ c & d & 0 \\ 0 & 0 & 1 \end{pmatrix} \begin{pmatrix} 1 & 0 & t_x \\ 0 & 1 & t_y \\ 0 & 0 & 1 \end{pmatrix} \cdot \begin{pmatrix} x_{in} \\ y_{in} \\ 1 \end{pmatrix} 的形式。
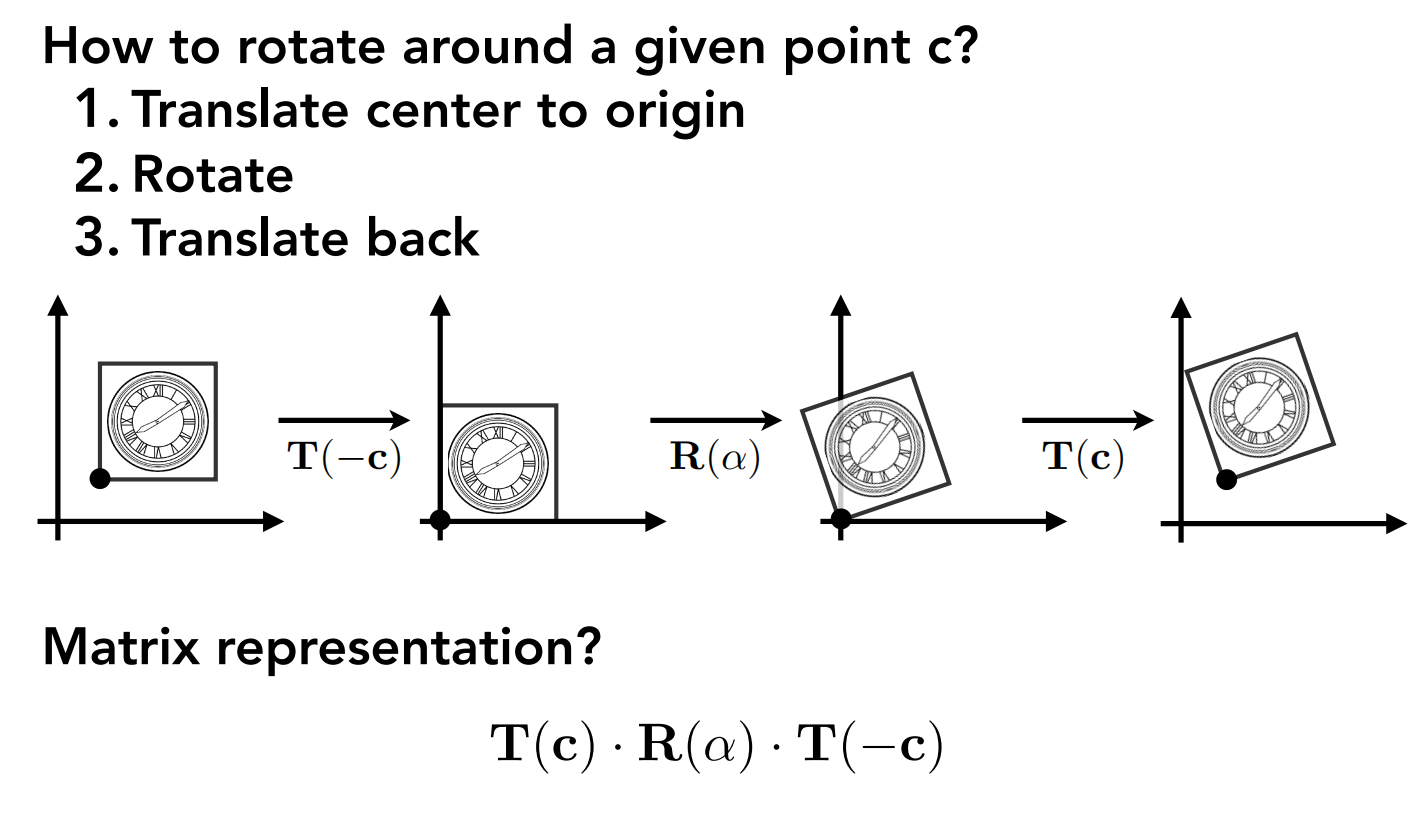
如何实现绕任意点的旋转?
绕任意点的旋转很难预判坐标轴的变换情况,想一次写出变换矩阵有点困难,可以通过如下步骤实现:
先进行平移,将旋转点平移至原点
通过旋转矩阵绕原点旋转对应角度
再将旋转点平移到原来的位置